Specyfikacja techniczna
| Szybkość poruszania: | 11 m/min (C-0618), 12,5 m/min (C-1048) |
| Czas ekspozycji: | 1-999 sek. (krok 1 sek.) |
| Dopuszczalne nachylenie: | 35% |
| Dopuszczalna temperatura: | -40 ºC do 70 ºC |
| Opóźnienie ekspozycji: | 12 sek. (Programowalne) |
| Maksymalna krzywizna rurociągu: | C-0618: 40d (dla rur 6”) 10d (dla rur 8”- 18”) C-1048: 40d (dla rur 10”-12”) 10d( dla rur d=14”- 48”) |
| Rozmiar standardowy: | 6” (152,4 mm)/48” (457,2 mm) |
| Zasilanie silnika napędowego: | C-0618: Akumulatory Ni-Cd 24V, 5 Ah Akumulatory Ni-Cd 24V, 10 Ah (opcja) C-1048: Akumulatory Pb 24V, 24 Ah Akumulatory Pb 24V, 42 Ah (opcja) |
| Dokładność zatrzymania: | +/- 5 mm |
Materiały do pobrania

Ulotka [EN]
Katalog produktów

3E NDT
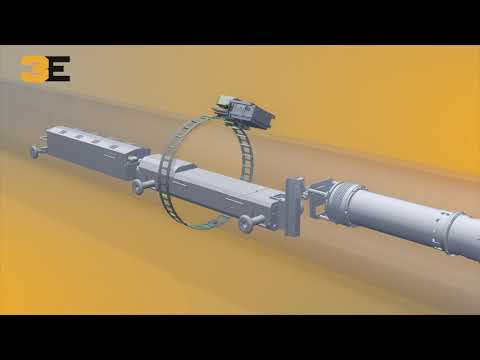
Crawler 3E Smart
3E Smart to system crawlera do zastosowania z lampą RTG lub źródłem Gamma do kontroli połączeń spawanych w rurach o średnicy wewnętrznej od 6” do 48” (lub 72” z odpowiednimi adapterami). System posiada zasilanie bateryjnie i jest w stanie poruszać się z prędkością około 12 m/min. System wykorzystuje elektroniczne urządzenie lokalizujące lub małe źródło promieniowania gamma do lokalizacji i pozycjonowania, zapewniając dokładność ruchu i zatrzymania na poziomie 5 mm, idealną do pozycjonowania lampy rentgenowskiej lub źródła promieniowania gamma w celu inspekcji złącza spawanego. Osie kół gąsienic są wymienne i regulowane, w celu zapewnienia centrowania jednostki w rurze. Sterownik czujnika, elektroniczny lub gamma (Cs 137), zatrzymuje crawler w określonej pozycji i po krótkim czasie rozpoczyna inspekcję. Po zakończeniu inspekcji promieniowanie zostaje zatrzymane, a crawler automatycznie przesuwa się do następnej, określonej wcześniej pozycji.
Dostępne są dwa typy urządzenia:
Smart 6 do rur od 6” do 18” i Smart 10 do rur od 10” do 48” lub do 72” z odpowiednimi adapterami.
KORZYŚCI DLA KLIENTA
Napęd/hamulec na cztery koła.
Niezawodny i wytrzymały w trudnych warunkach pracy.
Bezpieczny i łatwy w użyciu.
Pozwala na przeprogramowanie procedur operacyjnych w celu dostosowania ich działania do różnych warunków pracy, czy indywidalnych wymagań.
KLUCZOWE KORZYŚCI
NAPĘD
Każda oś ma indywidualny silnik napędowy do przemieszczania crawlera w rurze. Dlatego jeśli jeden zestaw kół nie dotyka rury, to drugi utrzymuje system w ruchu.
WSZECHSTRONNOŚĆ UŻYTKOWANIA
Modułowa konstrukcja umożliwia łatwe przekształcenie jednostki napędowej w celu użycia sprzętu gamma lub rentgenowskiego. Systemy współpracują z różnymi lampami rentgenowskimi i źródłami promieniowania gamma.
WYSOKIEJ JAKOŚCI KONSTRUKCJA
Do budowy crawlera użyto materiałów najwyższej jakości, aby zapewnić niezawodność nawet w najtrudniejszych warunkach.
PRZYJAZNY UŻYTKOWNIKOWI
Projekt systemu zapewniła przyjazny dla użytkownika interfejs z obwodami bezpieczeństwa, aby zapewnić bezpieczną i niezawodną pracę.